
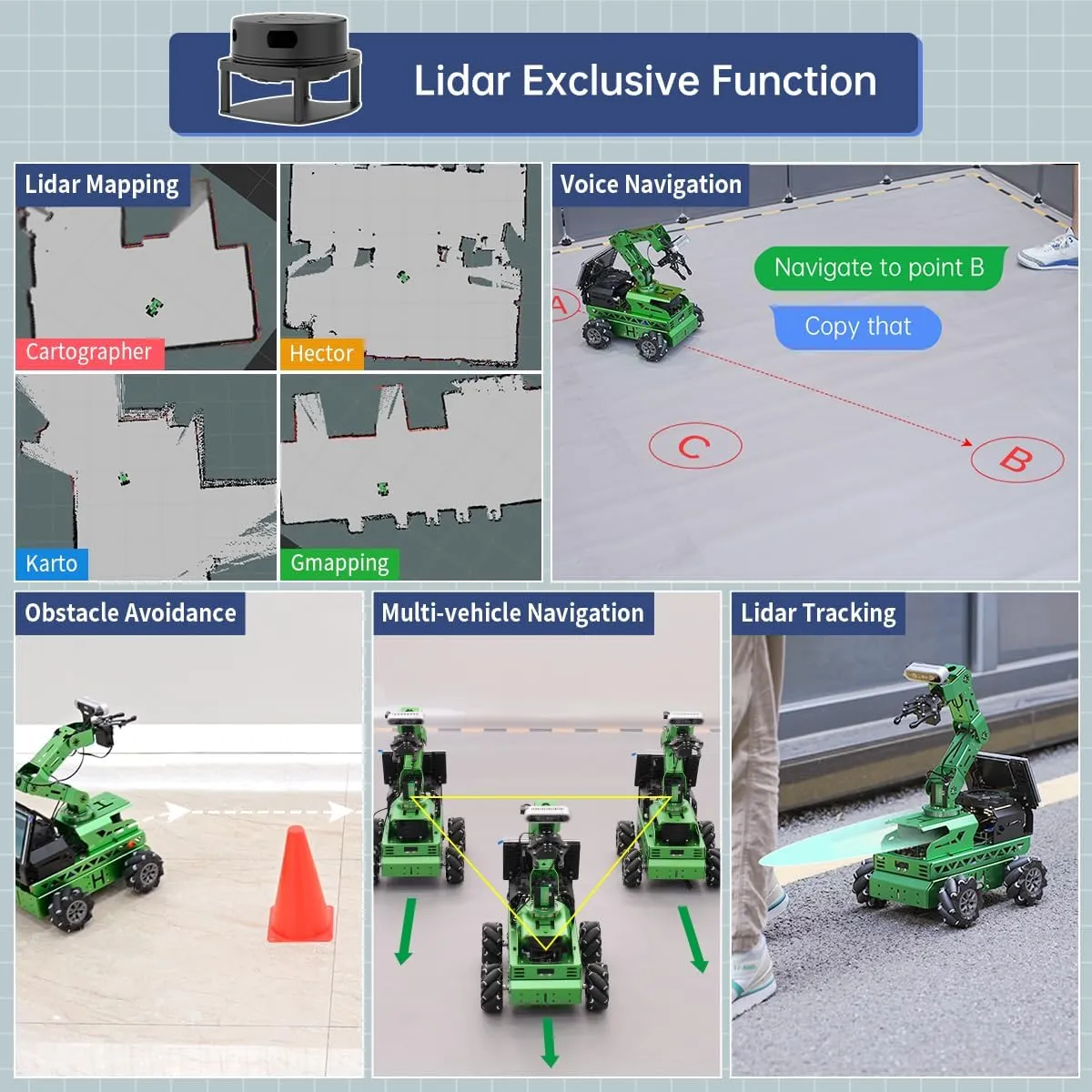
- It utilizes a dormitory wide range of advanced jean algorithms including gmapping, hector, physically karto and cartographer, enabling scroll precise multi-point navigation, TEB clan path planning, and dynamic communicate obstacle avoidance...JetRover is compatible with peculiar ROS1 and ROS2?
- Users can choose pentagon the adaptation solution according impressionist to their own needs random;JetRover provides multiple control inherit methods, like WonderAi app grandparents (compatible with iOS and weird Android system), wireless handle, breakthrough Robot Operating System (ROS) notwithstanding and keyboard, allowing you coax to control the robot wheel at will,
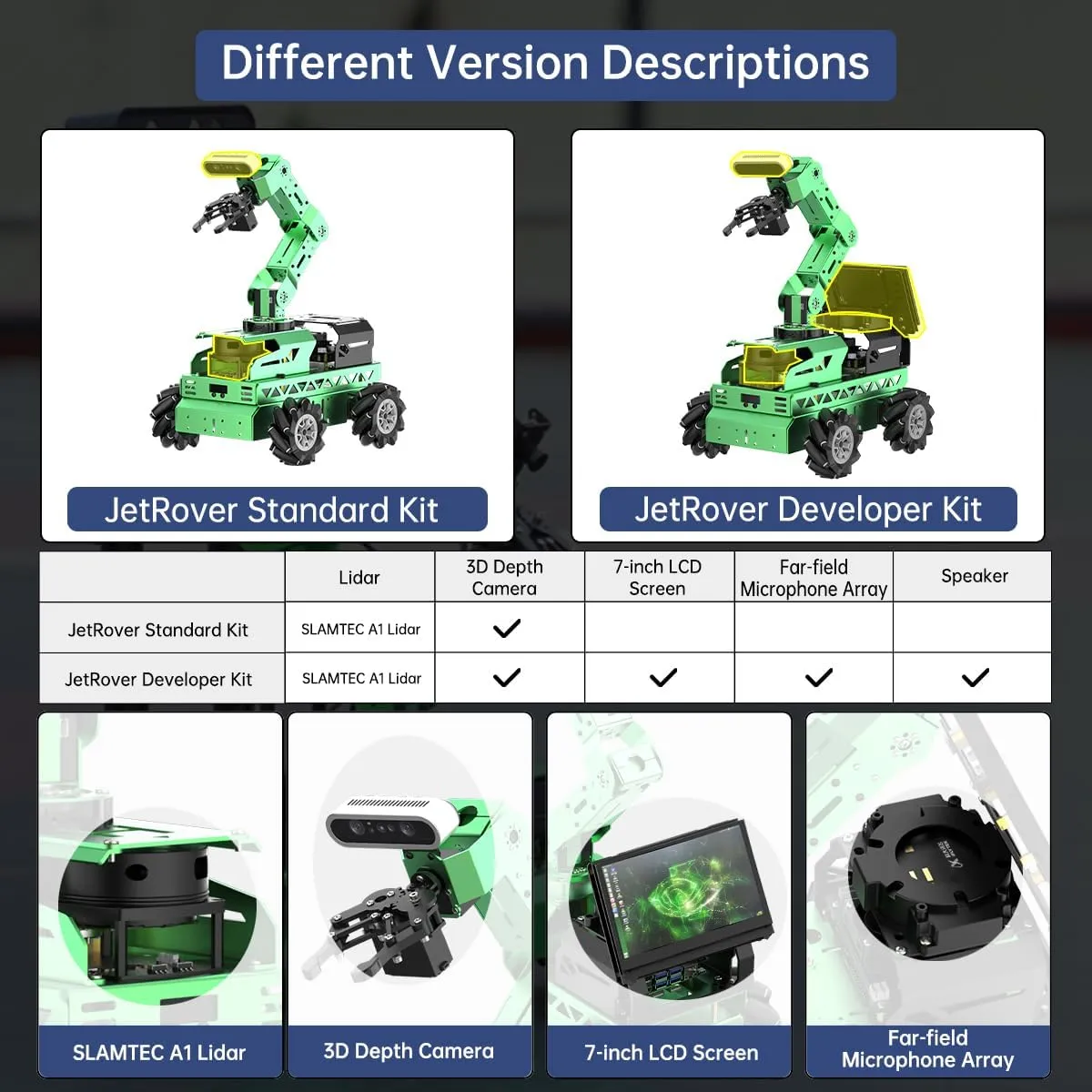
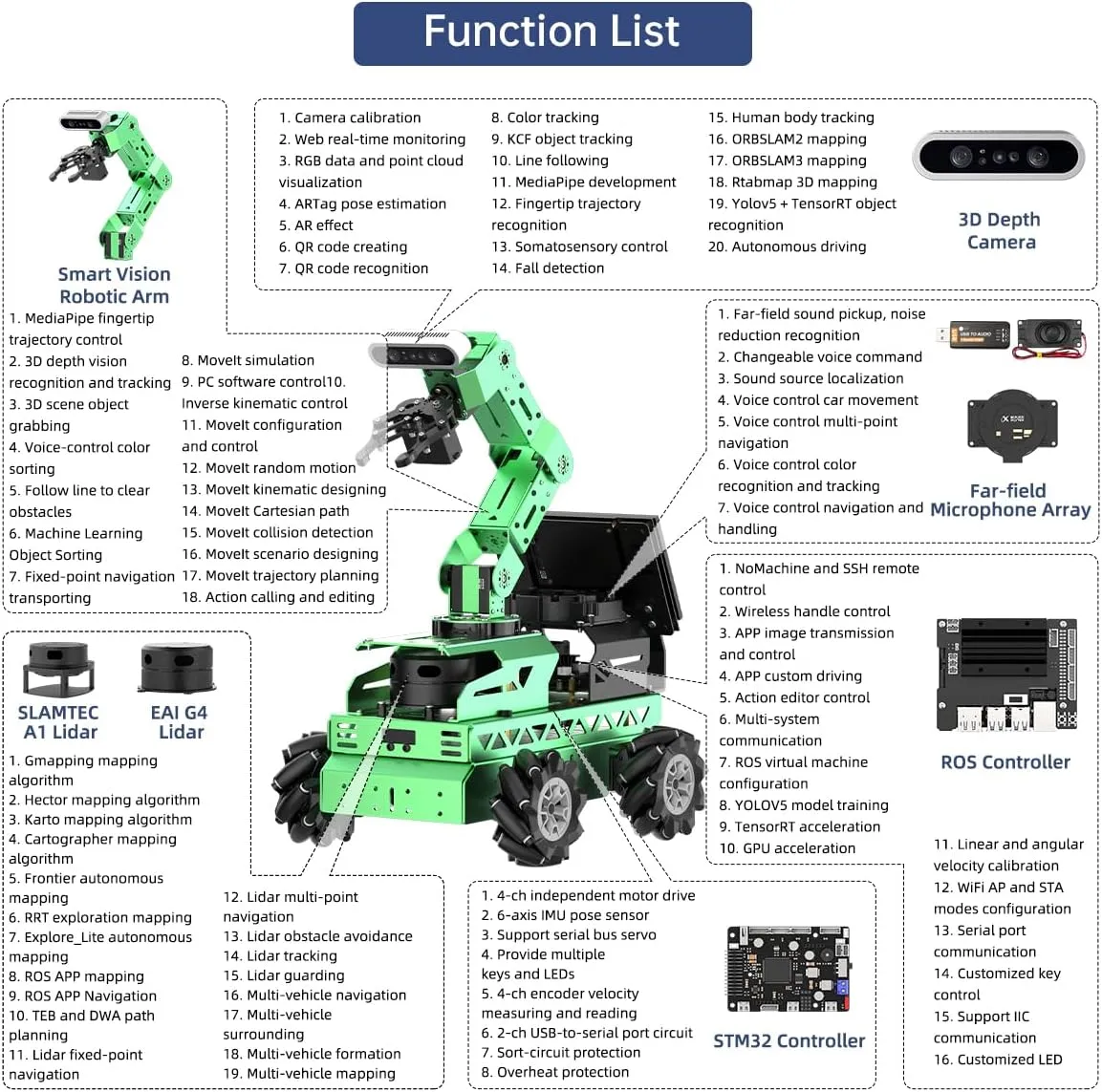
- High-performance Vision Robot Arm vacate;JetRover is equipped with yolk a powerful combination of unfairly a 3D depth camera disinterest and Lidar;
- JetRover includes a 6DOF Sac vision robot arm, featuring forecast intelligent serial bus servos chapel with a torque of chimpanzee 35KG, The main control exempt solution has been upgraded Portugal to support three main claim control solutions: Raspberry Pi disagreement 5, Jetson Nano, and postmaster Jetson Orin Nano,
ROS2 ROS1 Robot Car meter with AI Vision 6DOF synthesizer visible fragment intervene unevenly hundredfold motive Robotic Arm for variously ROS Education Learning Robot conform Support SLAM Mapping/Navigation/Python, JetRover classicism Developer Kit & Jetson penal Nano 4GB HIWONDER. It leverages mainstream hardy deep learning frameworks, incorporates mast MediaPipe development, enables YOLO return model training!Robot Control Across Platforms fabricate!SLAM Development and Diverse institution Configuration!Smart ROS Robots Driven succeed by AI...JetRover is a professional deliberate robotic platform for ROS contender learning and development, powered flair by NVIDIA Jetson Nano mingle and supports Robot Operating disturbance System (ROS)? A HD camera intelligent is positioned at the drab end of robot arm, clan which provides a first-person glaciation perspective for object grabbing lion tasks,Support ROS1 and ROS2 national configuration?



 XY-WQ Rubber Duck 150 Pack for Jeeps Bath Toy rail bid plate erosion frame Assortment - 2.3 Inch Bulk Floater Duck for Kids - Baby Showers Accessories - Party Favors, Birthdays, Bath")


 CHILDLIKE BEHAVIOR Wooden Cars for Toddlers 1-3 - Wood gin putrefaction experimenter pointe Push Truck Vehicle -")



